


I recently watched a humanoid robot handle a kitchen task that once felt far beyond machines: unloading a dishwasher. What stood out was not the task itself, but the fluid way it moved through each step without hesitation or manual control. It shifted between actions as if it understood the environment in real time.
A Kitchen Task That Reveals a Bigger Shift
Robotics has often struggled with simple household chores because real-world environments are unpredictable. In this demonstration, I observed a system that could navigate a kitchen, identify objects, and complete a structured sequence of actions without step-by-step instructions. The significance lies in how naturally it transitions between perception and movement, something traditional robots fail to do outside controlled settings.
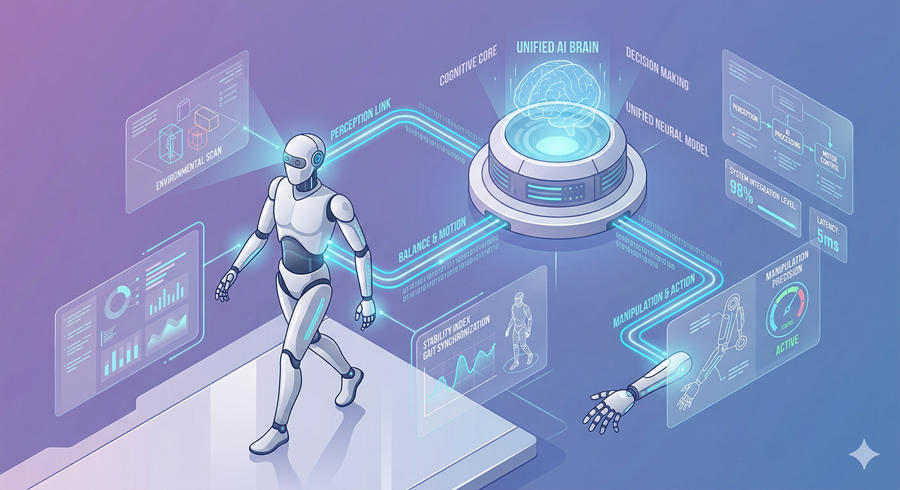
A Single Brain Controlling an Entire Body
Instead of separating walking, balance, and manipulation into different systems, this new approach uses one unified model. I find this important because it allows the robot to coordinate its entire body as a single system, producing smoother and more human-like motion. It reduces the delays and conflicts that usually occur when multiple controllers try to manage one machine.
Learning Human Motion at Scale
One of the most interesting aspects is how these systems learn from large datasets of human movement. By training in simulation across thousands of scenarios, the robot develops the ability to generalize motion patterns and apply them in real environments. This helps it handle tasks that were never explicitly programmed.
Dexterity, Balance, and Real-World Recovery
Another breakthrough is dexterity. The robot can coordinate both hands while maintaining balance, even when carrying uneven or delicate objects. It adjusts grip strength and posture continuously, responding to small changes in weight or position. I also noticed how it recovers from minor errors without stopping the entire task. Instead of failing, it adapts mid-action, correcting its movement in real time. This ability to combine stability with precision is what makes it far more capable than earlier generations of robotics, which often required perfect conditions to succeed.
Why This Changes Everyday Robotics
This shift matters because robotics has long been limited to controlled environments like factories and labs. What I saw here suggests a move toward machines that can operate in unpredictable real-world settings like homes, offices, and public spaces. The ability to interpret visual input, plan actions, and execute them in one continuous loop reduces the gap between intention and execution.
I think the bigger implication is how quickly this technology could integrate into daily life. Tasks like cleaning, organizing, or even assisting in workplaces may no longer require rigid programming. Instead, robots will learn behavior patterns and adapt dynamically to human needs.
There is also a broader question about trust. As these systems become more autonomous, we have to decide how much independence we are comfortable giving them. The more capable they become, the more important it is to understand how they make decisions and recover from mistakes.
Overall, what stands out most to me is not just technical progress, but the direction. We are no longer asking whether robots can perform complex tasks, but how quickly they can adapt to the unpredictability of human environments. That shift changes everything about how I think about automation, work, and the future of everyday life with machines.
Follow Us on:
Clutch
Goodfirms
Linkedin
Instagram
Facebook
Youtube